Center for Risk and Reliability
 470+
470+
graduates from our Ph.D., M.S., and M. Eng programs since 1991.
 6
6
Laboratories conducting cutting-edge research within the Center for Risk and Reliability.
 $70,000
$70,000
in funds raised for the Roush Fellowhship.
News & Events
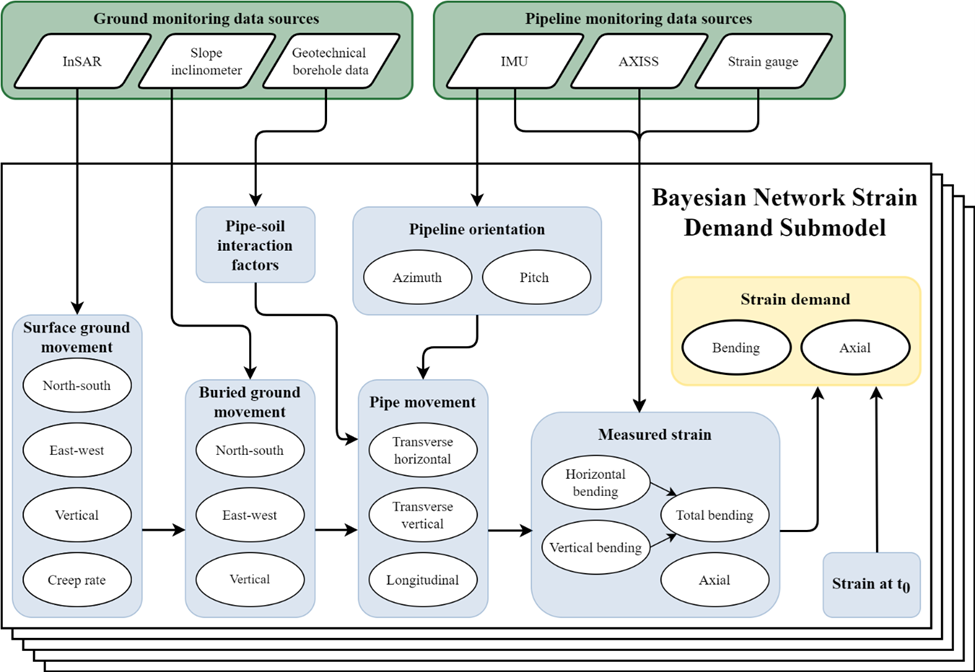
New Model Developed to Assess Pipeline Integrity in the Face of...
Pipeline integrity is a critical concern for the oil and gas industry. To address this, PhD student Colin...
Read More



September 12, 2024
September 13, 2024